



2020年07月21日
随着我国人口红利逐渐消失,用人成本持续上升,减少人工、提高仓储自动化水平已是大势所趋,仓储物流机器人在提高作业效率、降低工作人员劳动强度、优化资源、减少成本等方面的重要作用进一步凸显,再加上智能物流这一风潮,仓储物流机器人大行于世已然可期。
本期我们就对当前仓储物流机器人的发展历程进行剖析,阐明现状,解析瓶颈,探讨趋势,为仓库引入机器人提供一定的借鉴。
从普遍意义上来看,机器人的发展经历了三个阶段:
该阶段的机器人完全按照事先写好的程序进行工作,能够较好地模拟人的运动功能,对于机械性的重复工作有很好的取代性,但只能按照既定流程完成工作目标,无法灵活适应情况的变化。此外,由于缺乏感知环境的能力,它无法及时地识别异常情况并进行工作流程上的调整,从而可能导致不确定甚至危险事件的发生。
通过传感器装置感知环境,并利用计算机进行控制是自适应机器人的主要特征,它能随着环境的变化而改变自己的行为,虽然已经具有一些初级的智能,能够应对一定范围内的环境变化,但还没达到完全“自治”的程度,需要技术人员的协调工作。
当前,机器人行业已经进入智能化发展的初级阶段。这一阶段的机器人具有更类似于人的特征,主要表现在三个方面:多样的感知和交互能力、灵活的独立决策能力、一定的自我学习能力。
再来说仓储物流机器人,它们的发展也基本沿袭了这一路径。从作业环节和技术角度来分,仓储物流领域使用的机器人主要有两大类,一是移动类,是用于搬运、分拣环节的轮式移动机器人,即自动导引车(AGV),二是操作类,是应用于物品码垛、拆垛、分拣包装等环节的工业机器人,如机械手、并联机器人、协作(复合)机器人等。
下面,我们就分别以AGV和机械手为例,来分析仓储物流机器人的技术发展历程。
经过多年的发展,AGV在安全性、稳定性、准确性、性价比等诸多方面都有了巨大的进步,但最为突出的还是导航技术的迭代升级。
(1)1.0时代:导引技术-预定路径
20世纪70年代起, AGV开始兴起,那时的AGV显然是程序控制机器人,只能沿着固定的导引路径行驶,具体的导引技术包括磁条导引和磁点导引,其特点是要预设参照介质于事先规划好的AGV的行走路径之上或使参照介质与AGV的行走路径相关联,AGV在工作过程中通过读取磁条或磁点来确认行走位置。


较为原始的导引技术AGV产品
(2)2.0时代:地标技术-预定路径
2008年,二维码导航、RFID导航、激光反射板导航技术等地标技术快速发展,以二维码导航为基础的AGV机器人不断涌入市场。其中以2012年亚马逊在各地仓库大规模部署的Kiva最为有名,依靠传感器感知环境,具备自适应机器人的特征,实现“货找人、货位找人”的模式,助力仓储物流中心实现无人化作业。

根据不同应用场景,列举以下几个典型的KIVA代AGV产品。



(3)3.0时代:SLAM技术-未预路径
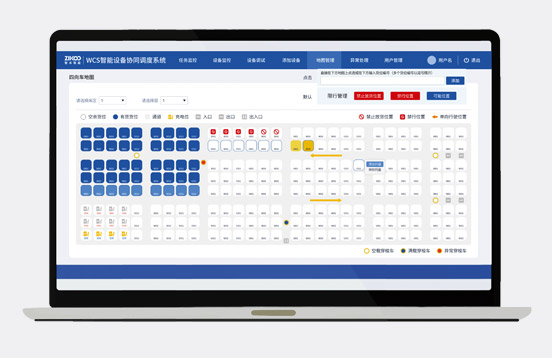
近年来,无预设参照介质的SLAM导航技术逐渐成熟,自主移动机器人AMR(Automatic Mobile Robot)应运而生,从某种意义上来说,它已经具备了第三阶段智能机器人灵活的独立决策能力,不但能够实现自主避障,还可以实现自主规划路径。
SLAM(即时定位与地图构建),是指运动物体根据传感器的信息,一边计算自身位置,一边构建环境地图的过程,解决机器人等在未知环境下运动时的定位与地图构建问题。目前SLAM导引技术主要有激光雷达式、激光扫描轮廓式、机器视觉式三大主流分支。其中激光雷达式主要应用于室外环境下的无人驾驶车辆领域,激光扫描轮廓式主要用于室内机器人产品,而机器视觉式相对于前两者发展较慢,应用案例较少。


几款知名AMR产品
随着技术的发展,机械手已经可以用于装卸、分拣、码垛等多类仓储作业场景中,功能日趋复杂,但作为操作类机器人,最重要的还是操作的精细化水平的高低,具体则是反映在抓取能力和识别能力的提升上。

(1)从纯机械部件到自适应抓手
传统码垛机器人的抓手由纯机械部件组成,结构复杂、整体笨重、动作速度慢、不具备自动检测、控制位置能力、控制精度低、受工作环境温度和工件重量影响会产生运动不到位等众多问题,影响作业安全和效率,最重要的是,属于第一阶段程序控制机器人,只能特定地抓取固定包装和规格的货物,无法满足品种多样化地抓取。
但在如今,自适应、多功能的机器人抓手技术已然成熟,机器人夹爪自动控制器的中央处理器内预置工作程序,可与机器人的主控制器建立通信,当机器人到达拾取货物位置开始抓取时,抓手夹取过程受负反馈作用,当检测抓手压力变化时,自动调节电机扭矩以达到抓取力度和行程的控制。这如此一来,对于不同规格的物品,一种夹爪就可以满足抓取任务,减少了频繁更换夹具的流程,提高了码垛工作的效率。

(2)从固定抓取到灵活拣选
最初用于仓库码垛的机械手不具备识别能力或识别能力很差,往往需要人工将货物进行标准化的摆放处理,影响作业效率提升,更不用说将此类机械手用于多品类货物的分拣作业中了。
而机器人视觉识别技术的成熟,配合人工智能视觉算法和深度学习,提升机械手智能化水平,让选择化的识别抓取成为可能。基于二维平面和三维立体激光的视觉系统配合多功能并联机械手,可以自动识别被抓取商品的颜色、位置和大小等参数,采用与之相应的机械手抓取,然后放到搭配的载体或输送线上,实现拣选商品的功能。

未来,仓储物流机器人在向第三阶段智能机器人发展的道路上,还将呈现以下趋势:
出于提高仓库作业整体效率效益和降低设备部署成本的考虑,管理者在打造自动化、智能化仓库时,往往偏向于采购功能更加集成、用途更加丰富的机器人,并为之调整作业模式。如京东无人仓的Kiva机器人同时承担着搬运和分拣两项功能。

复合机器人的出现更是功能高度集成的结果,融合了AGV自主移动及机械手灵活抓取两项功能的移动机械手,具备更广泛的用途。

感知、决策、执行是评估机器人的三大指标,未来的高性能的仓储物流机器人一定不是单纯的硬件,也不是单一技术的极致体现,而是物联网、人工智能等各种技术的综合体,让机器人发挥出最大的效能。比如机械手要想实现精准拣选,识别视觉技术、人工智能算法、手爪夹具技术三者缺一不可。



















 快速导航
快速导航




 199417789554008501028
199417789554008501028 19941778955
19941778955  info@zikoo-int.com
info@zikoo-int.com 南京市雨花台区软件大道170-1号天溯科技园4幢4层
南京市雨花台区软件大道170-1号天溯科技园4幢4层
